胡寿松《自动控制原理》(第7版)复习笔记考点归纳 【完整内容点击文中链接获取】
第二章:控制系统的数学模型
【考点】根据系统结构图或信号流图求解系统传递函数。
一、控制系统的时域数学模型
1、建立控制系统微分方程的步骤
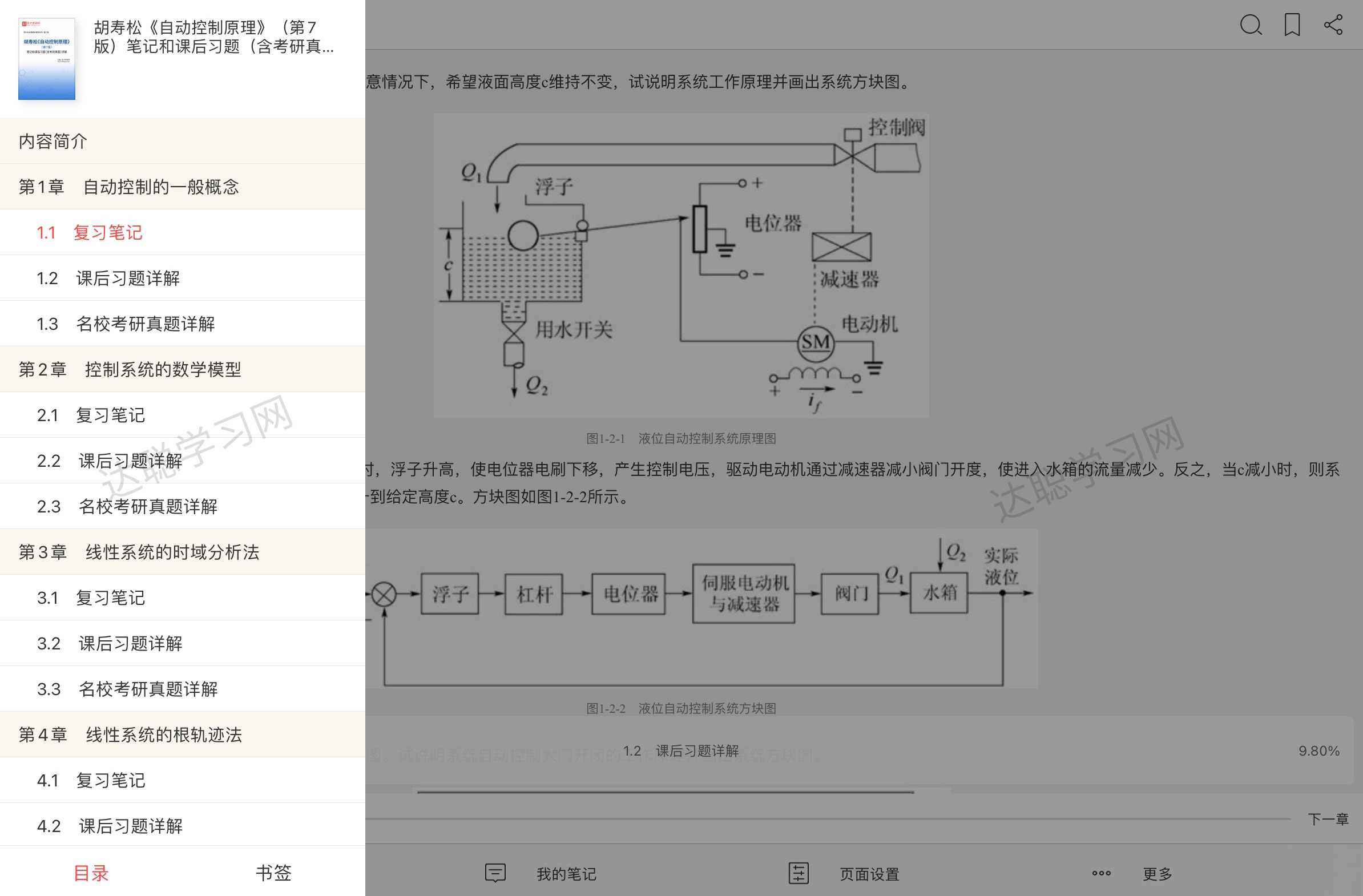
(1)依据系统原理图,结合相应的学科规律,分别列写组成系统各元件的微分方程;
(2)消去中间变量,得到描述系统输出量与输入量关系的微分方程。
【注意】①信号传递的单向性;②后级元件对前级元件的负载效应。
2、线性系统的基本特性
(1)叠加性:对于一个y=f(t)的系统,若满足f(t1+t2)=f(t1)+f(t2),则称系统具有叠加性;
(2)齐次性:对于一个y=f(t)的系统,若满足f(Kt)=Kf(t),则称系统具有齐次性。
同时满足齐次性和叠加性的系统称线性系统。
3、线性定常微分方程的求解——拉氏变换法
(1)考虑初始条件,对微分方程中的各项分别进行拉氏变换;
(2)求解代数方程,得到输出量拉氏变换函数的表达式;
(3)对输出量拉氏变换表达式进行反变换,得到时域表达式,即为所求微分方程的解。
4、非线性微分方程的线性化
(1)在一定条件下,可直接将一些元件视为线性元件;
(2)切线法或小偏差法,即在一个很小的范围内,将非线性特性用一段直线来代替。
5、运动的模态(见表2-1-1)
表2-1-1 运动的模态

| 内容来源 |
胡寿松《自动控制原理》(第7版)笔记和课后答案  |
二、控制系统的复数域数学模型
1、传递函数及其性质
线性定常系统的传递函数,定义为零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。数学表达式为:
性质:
(1)m≤n,且所有的系数均为实数;
(2)传递函数表示输出量与输入量之间的关系,只与系统(或元件)本身和结构参数有关,但不反映系统内部的任何信息。
【注意】传递函数是一确定系统的固有性质,与输入输出无关。此处是考研常考且考生易混淆的概念之一。
(3)传递函数与微分方程可相互转化;(微分算符d/dt与复数s相互置换即可)
(4)传递函数的拉氏反变换是单位脉冲响应,反映系统的运动特性。
2传递函数的零点和极点
传递函数的分子多项式和分母多项式因式分解后可得到如下形式:

则式中,zi为传递函数的零点;pj为传递函数的极点;系数K*=b0/a0称为传递系数或根轨迹增益。
【注意】传递函数的这种表示形式在频率法中使用较多。
3传递函数的零极点对输出的影响
(1)传递函数的极点就是系统微分方程的特征根,决定了系统响应中自由运动的模态;
(2)传递函数的零点影响各模态在响应中所占的比重,从而影响响应曲线的形状。
……
【完整版】 达聪网 胡寿松《自动控制原理》(第7版)笔记和课后习题(含考研真题)详解
热门内容
阎石《数字电子技术基础》(第6版)全套资料【笔记+题库】
樊昌信《通信原理》(第7版)笔记和课后习题(含考研真题)详解
邱关源《电路》(第5版)笔记和课后习题(含考研真题)详解